电机驱动控制系统专业制造商
专注行业定制软启动器、变频器
全国服务热线:
18706209989
0512-80981688
电机驱动控制系统专业制造商
专注行业定制软启动器、变频器
18706209989
0512-80981688

为什么今天的L4无人驾驶无法到达终局?
很多场合,“智能驾驶”和“无人驾驶”被混为一谈,而后者显然更为大众所喜闻乐见。更加专业的群众,愿意用“L4”、“L5”来说事。“L5”的车就像变形金刚汽车人,降落到世界任何一个地方,马上能熟练地汇入滚滚车流,这显然仍是遥远的传奇。于是“L4”成了圈子里所有人的寄托。当然,每个圈子里都有所谓的鄙视链,比如这个圈子里:
L4的看不起L3,殊不知L3的极限能力与L4相差无几,从L3出现意外状况、到驾驶员接管前的10几秒,需要无人状态的fail operation(比如减速靠边、停到安全区域),这种能力已经非常接近L4。
在大马路上练的L4,看不起各种特殊场景的L4。这里也有几个误解:
第一,如果跑来跑去只在几条大马路上,那几条大马路也与“限定场景”无异(机器学习里叫overfit)。你马上挑出几条新的马路来,估计谷歌Waymo也够呛。
第二,很多特殊场景也是开放环境。比如大商场的停车场有社会车辆、出没不定的行人和拥挤的十字路口,与大马路相比,主体算法的难度是类似的,差别只是在于训练数据和反应速度(这又取决于传感器的工作距离、分辨率和计算芯片的处理速度)。
第三,很多特殊场景是需要A照司机的,这些场景需要“C照马路小白”所不具备的驾驶技巧。
第四,很多人看好的大马路L4,却是在3、5年内很难真正无人驾驶的(需要坐安全测试员),而很多特殊场景的L4,却是在1、2年内可以商业化的。
更要命的是,今天的L4算法(包括大马路和特殊场景),很可能都无法到达终局。换言之,满城尽跑无人车时,他们大概率是不同的物种,跑不同的人工智能算法。
最后一点似乎是故作惊人之语,这里不妨科学论证一下。
且看这张图。
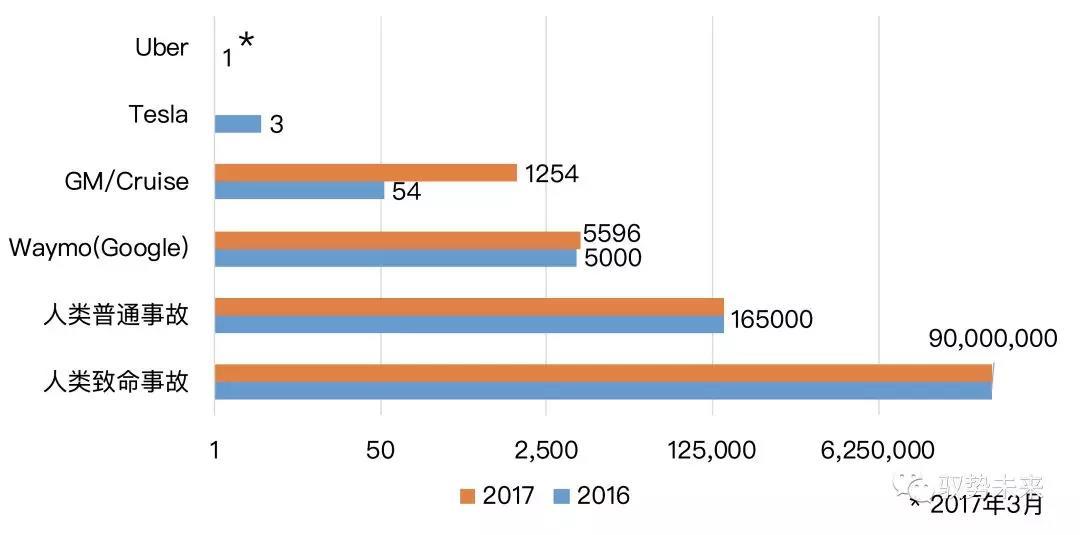
图中X轴是需要干预或出现事故的平均里程数。Waymo在2017年的水平是每自动驾驶5596英里(9006公里)才有1次人的干预,遥遥领先于其他选手。然而再推敲下去,细思极恐。
第一,Waymo的水平离美国人类驾驶员的平均水平,差距巨大。后者是每16.5万英里出一次普通事故,每9000万英里才出一次致命事故。这个数据是基于加州城郊公路的30多万英里,交通场景总体不算特别难。
第二,Waymo的提升速度在减缓。其2015年的水准是1300英里一次干预,到2016年提升了近3倍,但2017年相较去年只提升了10%出头。再看月度的数据,2017年除了年底出现了令人惊异的增长,其他月度还是起伏不定。年底出现跃升,前年也有过,也许跟假期车少有关?无论怎样,2018年是否能有显著增长,还不好说。

第三,Waymo的算法(以及今天几乎所有L4的算法)都是数据驱动的,见过的大概率会,没见过的大概率不会,所以Waymo领先主要是领先在数据积累,去年底的时候已经有640万公里的实测数据。然而,对Waymo来说,通过路测方法收集数据已经变得异常昂贵:2017年的63次干预中大致有2/3是因为算法问题,而针对每个问题,要花1万多公里的油费和测试驾驶员人工费用,才能获得1个高价值数据。
苏州艾克威尔科技有限公司 Copyright © 2016-2018
工商备案:苏ICP备09069982号-1
